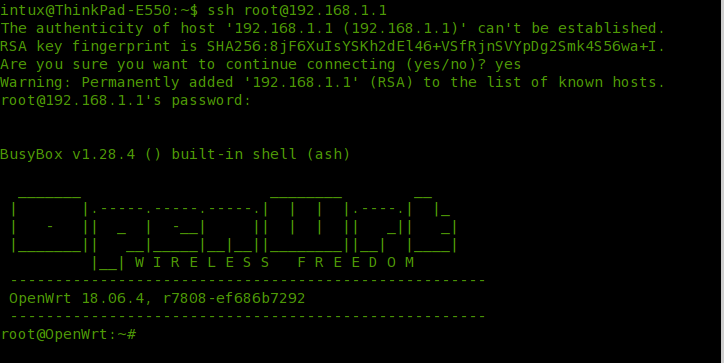
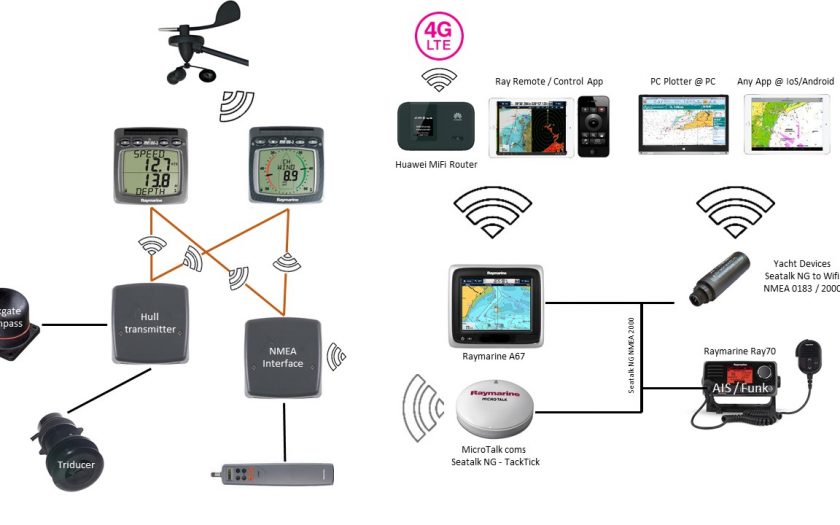
WLAN Router & iPhone Hotspot auf dem Boot
Nicht wenige nutzen einen WLAN Router auf ihrem Boot um einen zentralen Netzwerkknoten zu haben, an dem man sich anmelden kann und über ihn alle Systeme die im Netz eingebunden sind zu erreichen. So auch
Weiterlesen




Neueste Kommentare