Pinnenpilot zum Autopilot – Navigation 4.0
Wenn ein Pinnenpilot der als Autopilot arbeiten soll, kann es ein langer Weg sein. Nicht zuletzt, weil die Angaben der Hersteller in den Bedienung- und Installationsanleitungen mehr als dürftig sind. Ein Pinnenpilot spricht idR eine Sprache um Befehle entgegenzunehmen. Ein Pinnenpilot spricht selber aber eher nicht. Also brauche ich doch lediglich die Daten, die ein Pinnenpilot verarbeitet an ihn senden. So dachte ich bereits mehrfach und hab das Projekt immer wieder auf die Bank geschoben.
Mein Raymarine ST1000+ ist, was das Interface anbelangt, baugleich mit dem ST2000+. Das folgende gilt also für beide.
Die Geräte verstehen Seatalk der 1. Generation sowie NMEA 0183. Wobei man wissen muss, Seatalk 1 ist ein Raymarine Verbindungsstandard und NMEA 0183 ist eine Sprache. Über Seatalk 1 werden am Ende auch nur NMEA Daten ausgetauscht, dies aber in einem, ich sag mal unterschiedlichen Umfang. Oder als Metapher, es ist dieselbe Sprache aber zwei Dialekte in denen es ab und an Worte gibt, die man erklären muss.
Wenn ich also ein Gerät per Seatalk physikalisch anbinden kann ist noch lange nicht gesagt, dass es den Informationsgeber versteht oder es wird nur ein Teil der Datensätze verstanden. Dazu muss ein Übersetzer her der
Seatalk nach NMEA Übersetzungstabelle
Seatallk in NMEA0183
| Depth | DBT |
| Wind angle and speed | MWV |
| Speed through water | VHW |
| Trip and total mileage | VLW |
| Water temperature | MTW |
| GPS position | RMC |
| Magnetic heading | HDG |
übersetzt. Man sieht, es sind nur die Datensatz-ID´s oder Datensatz Namen, die unterschiedlich sind, deren Inhalte sind dieselben. Warum machen Hersteller so etwas? Kohle! Sich abgrenzen, um ihre eigenen Technologien teuer zu verkaufen.
Zur Übersetzung reicht es nicht eine passende Kabelverbindung zu haben. Das empfangende Gerät muss entweder in der Lage sein den anderen Dialekt ebenfalls zu verstehen oder man schaltet einen Übersetzer dazwischen.
Für einen ST1000/2000+ ist das in der kabelgebundenen Welt z.B. ein ST70 Autopilot Device. Der hat eine Schnittstelle für den Pinnenpiloten die NMEA spricht und kann mit dem Seatalk Bus, an den z.B. die Windfahne oder der Plotter angeschlossen ist, reden.
In meinem Fall habe ich aber einen Seatalk NG Bus und meine TickTack Gerätschaften kommunizieren per Funk mit dem Plotter. Keines der Geräte

die ich eingebaut habe stellt ein Kabelinterface für eine NMEA 0183 Verbindung zur Verfügung an die ich den Pinnenpilot anschließen könnte.
Mögliche alternative Lösungen für den Pinnenpilot
Meist kommt gleich, nimm einen vernünftigen Pinnenpiloten für ca. 1.500,-. Kann man, muss man nicht. Die ST Gerätschaften sind für nen Binnensegler wie mich absolut tauglich. Den gelegentlichen Ausflug ins Salzwasser sollten sie ebenfalls gut bedienen.
Dann wird hier und da zu einem Interface geraten wie z.B. dem Raymarine ITC-5 oder einem Actisense Adapter oder andere Geräte die sicherlich funktionieren. Bei einer kabelgebundenen Seatalk 1 oder NG Anlage würde ich hier den Actisense nehmen. Aber es geht viel einfacher.
TackTick hat ein NMEA Interface, das T122. Es empfängt die Funkdaten der Instrumente (Wind/Multi/Fluxgate) sowie die Plotterdaten über das Microtalk Wireless Interface. Also bekomme ich die Wind- und Kompass-Kursdaten auch ohne Plotter. Wenn ich den Plotter nutze, bekomme ich zusätzlich die GPS Positionsdaten und kann den Pinnenpiloten über Wegepunkte und Routen steuern.
Steuerung des Pinnenpiloten über Wegpunkte
Vorneweg. An der obigen Übersetzungstabelle von Seatalk nach NMEA sieht man, da sind keine Datensätze enthalten die Wegpunkte und Routen beinhalten. Deshalb bekommt man das per Seatalk auch nicht direkt hin, sondern braucht einen ST70 davor der das wieder entsprechend in der Steuerung verarbeitet. Über eine reine NMEA Verbindung liegen die kompletten Datensätze an.
Vielfach wird kritisiert man könne doch nicht nach Wegpunkten automatisch steuern und dann unter Deck gehen usw.. Logisch! Die Nutzung eines Autopiloten entbindet ja nicht von der Wache. Aber man kann eben gemütlich daneben sitzen, vielleicht unter der Sprayhood und hat trotzdem alles im Griff. Ist ein Wegpunkt erreicht und wäre nun eine Kursänderung notwendig, dann piepst der Pinnenpilot und zeigt die Änderung an. Nun muss man aktiv bestätigen damit der Pipi (Kurzform von Pinnenpilot) den Kurs ändert. In der Regel wird dabei mindestens eine neue Segelstellung notwendig, wenn nicht gar ein Manöver.
Das Schöne an der Wegpunkt Steuerung im vergleich zur Windfahnensteuerung, der Pipi gleicht Abdrift und Versatz aus. Eine Windfahnensteuerung schaut immer nur, dass ich optimal zur anliegenden Windrichtung liege. Bei einer längeren Strecke liege ich am Ende dann weit neben meinem Zielpunkt. Für Atlantiküberquerungen sicherlich gut. Man kann über den ST1000/2000+ natürlich per Windfahnensteuerung navigieren. Hier lässt sich dann ein Wert eingeben, ab dem ein Alarm ausgegeben wird, wenn der Wind um eine bestimmte Gradzahl dreht. In dem Fall kann man dann den Kurs und die Segelstellung anpassen.
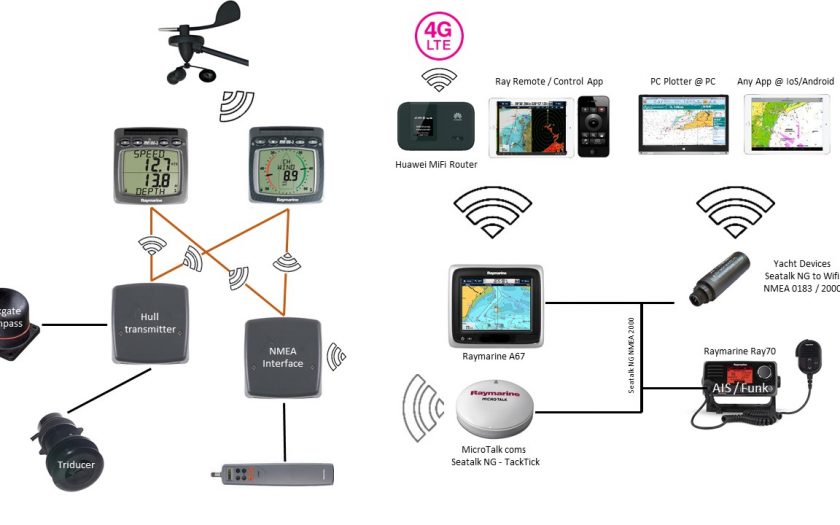
Mein neues Setup schaut damit so aus
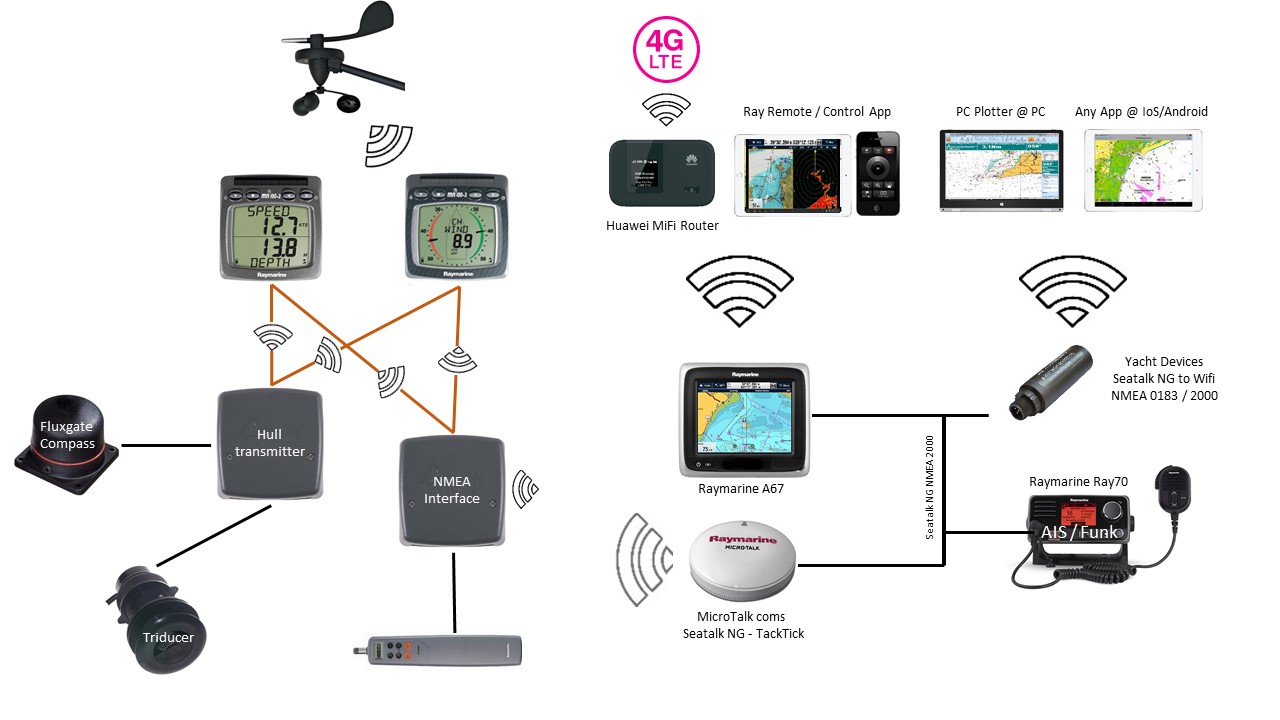
Den T122 gibt es ab 350,- im Handel. Immer wieder werden die Teile jedoch recht preiswert gebraucht angeboten. Die Installation erfolgt direkt beim Pinnenpiloten. Somit nutze ich die 12V Verbindung des PiPi (Sicherung für das Interface nicht vergessen) und hab nur zwei kurze Kabel zwischen den Gerätschaften bzw. der Buchse des PiPi und dem NMEA Interface.
Viel Spaß beim Auto-Pilotieren!
Weiterlesen
Neueste Kommentare