
Installing a GPS in a ACER Spin 3 Laptop.
ACER SPIN 3. Deutsche Version weiter unten. On a sailing boat, GPS is useful and or even essential for survival. Ok, but paper charts and navigation with them should be mastered by every sailor and
Weiterlesen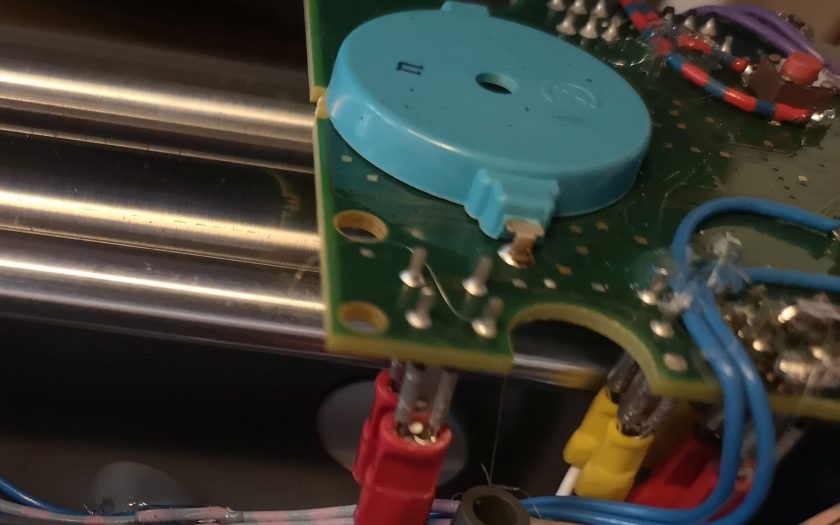
Neueste Kommentare