WLAN Router & iPhone Hotspot auf dem Boot
Nicht wenige nutzen einen WLAN Router auf ihrem Boot um einen zentralen Netzwerkknoten zu haben, an dem man sich anmelden kann und über ihn alle Systeme die im Netz eingebunden sind zu erreichen. So auch auf Linguini.
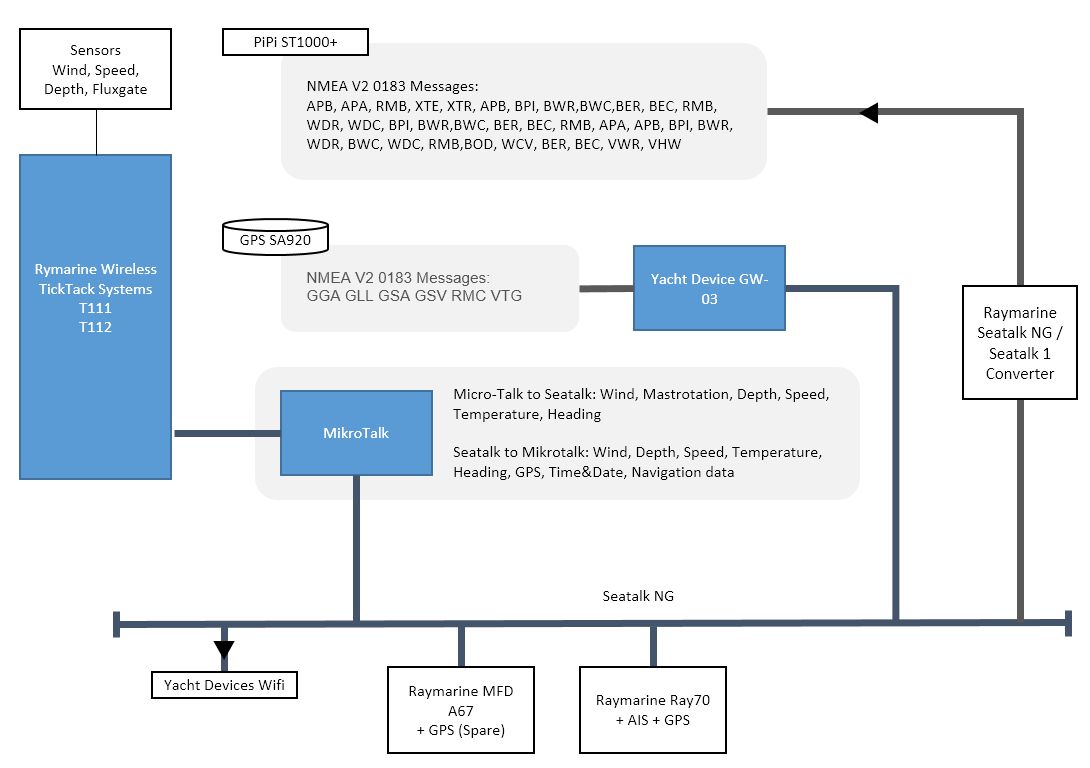
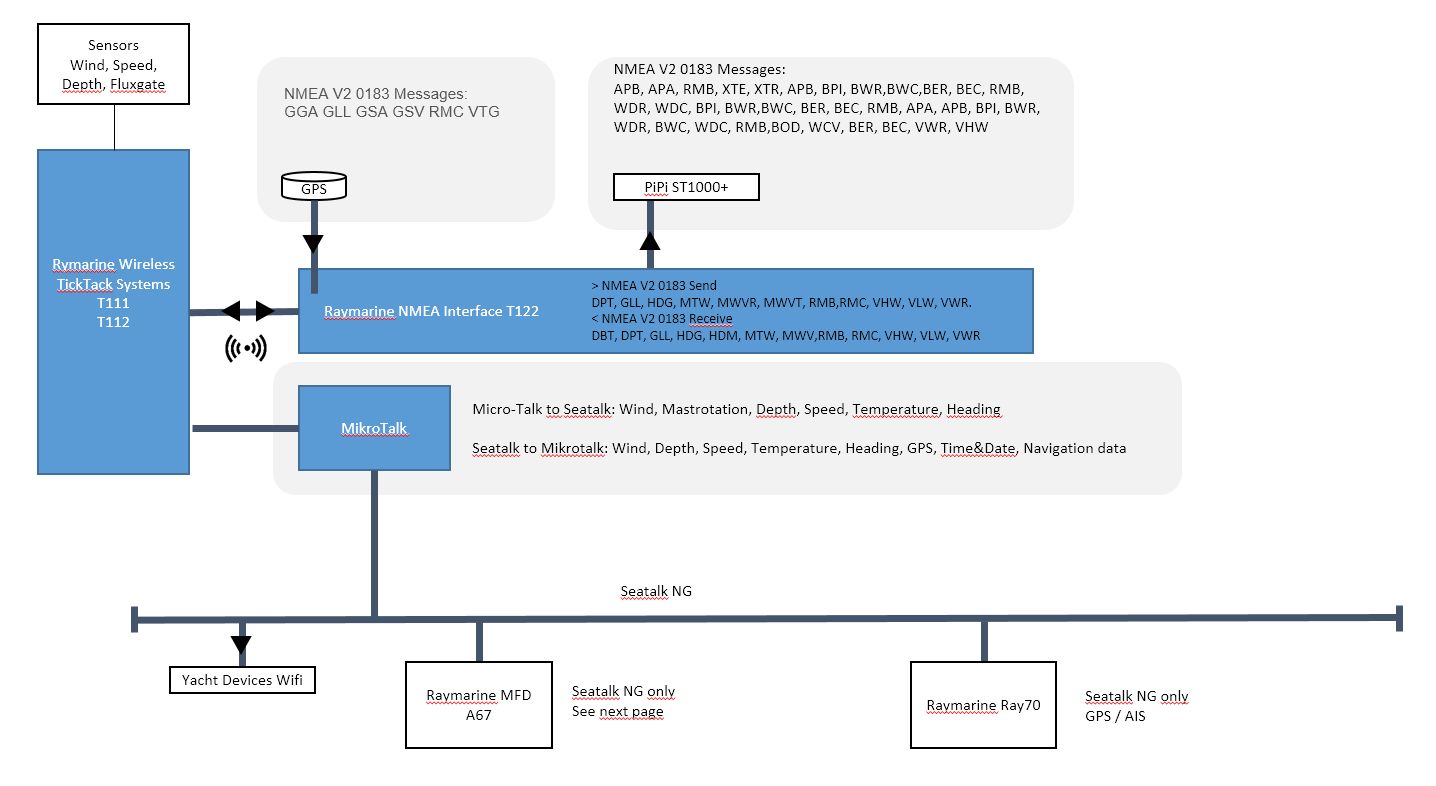
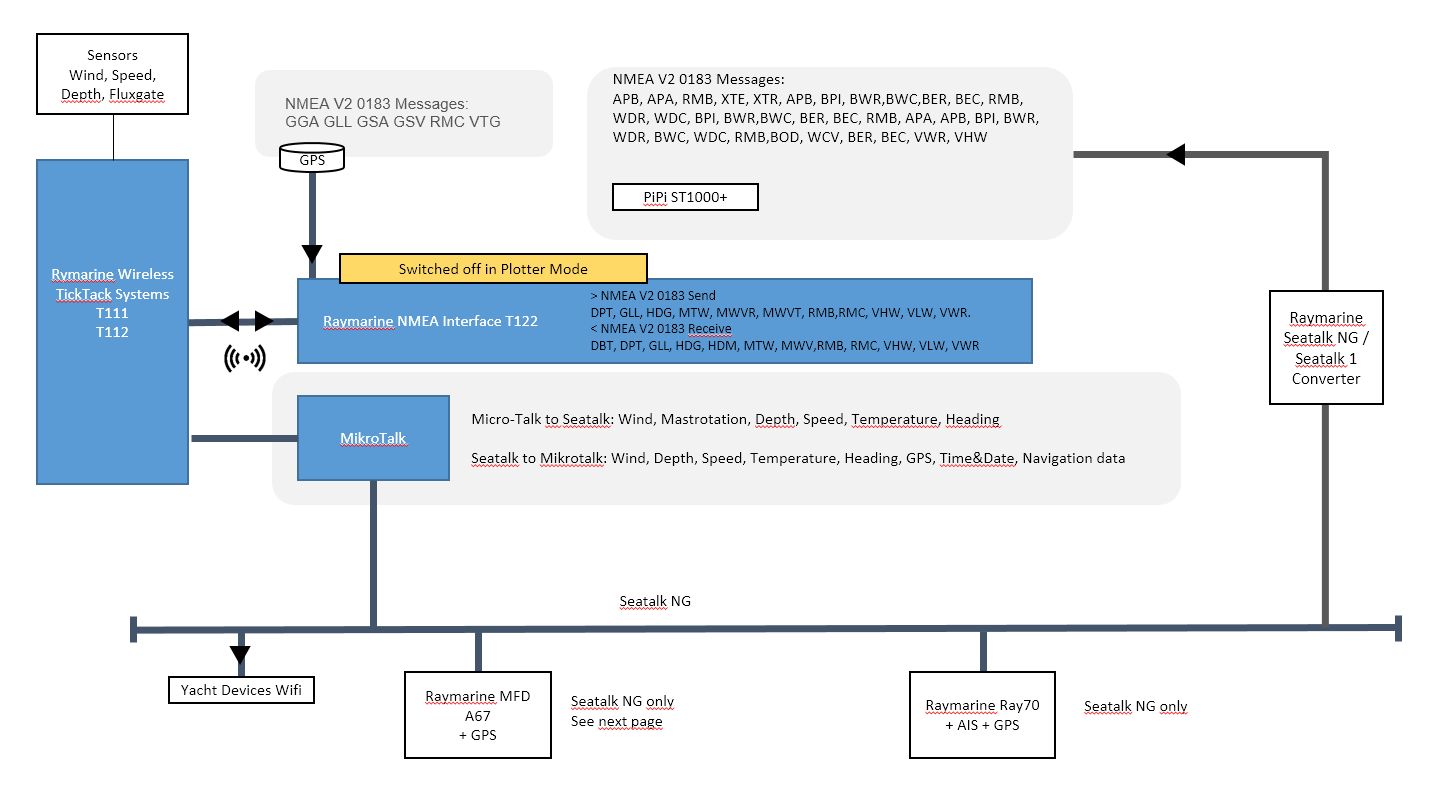
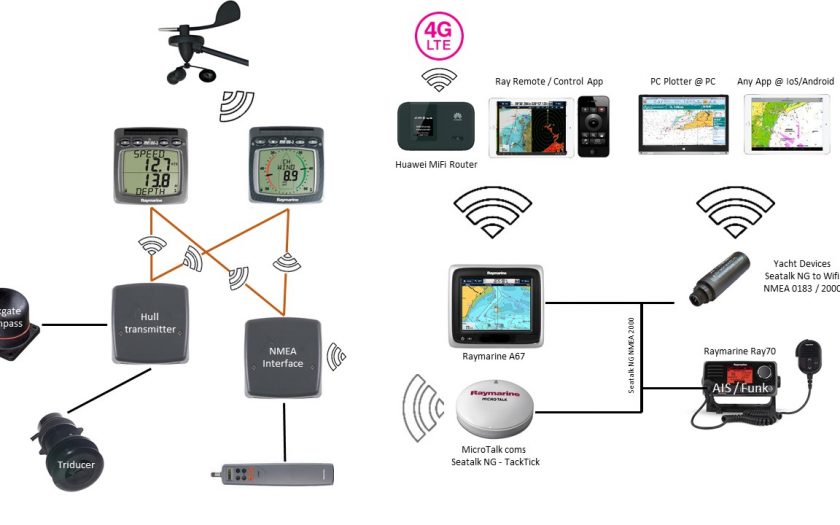
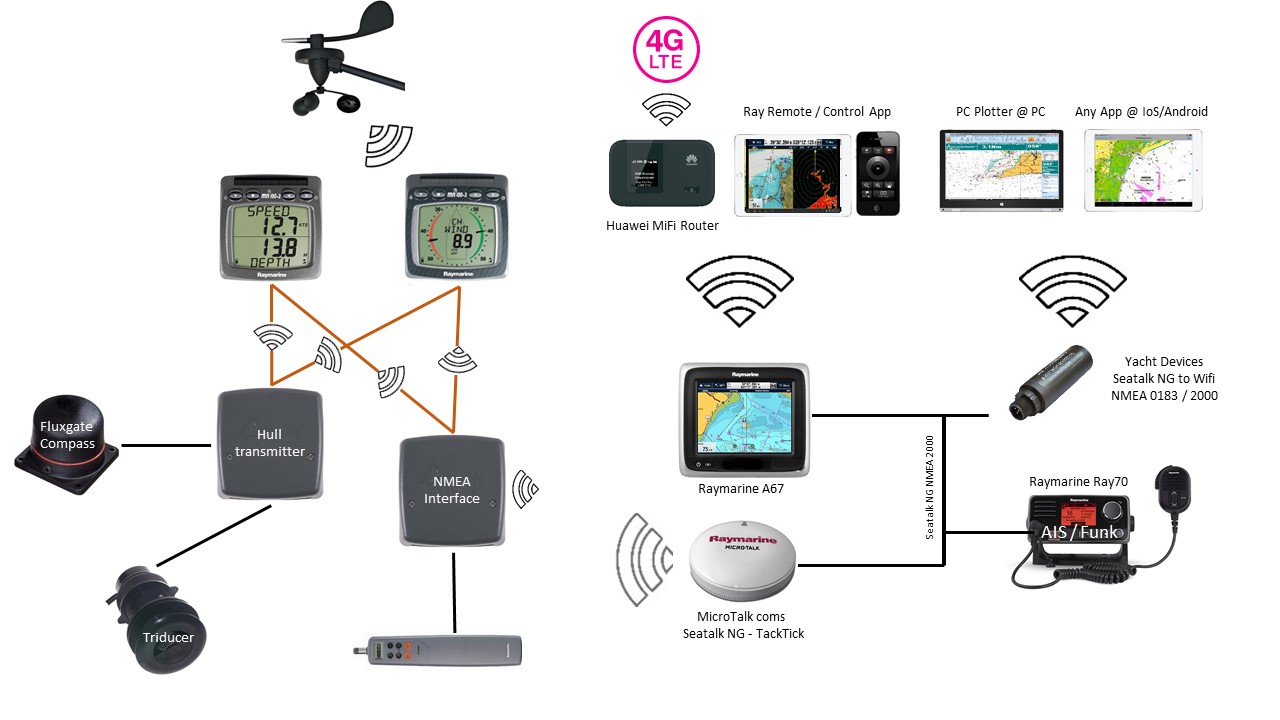
Im Wesentlichen sind es diese Gerätschaften:
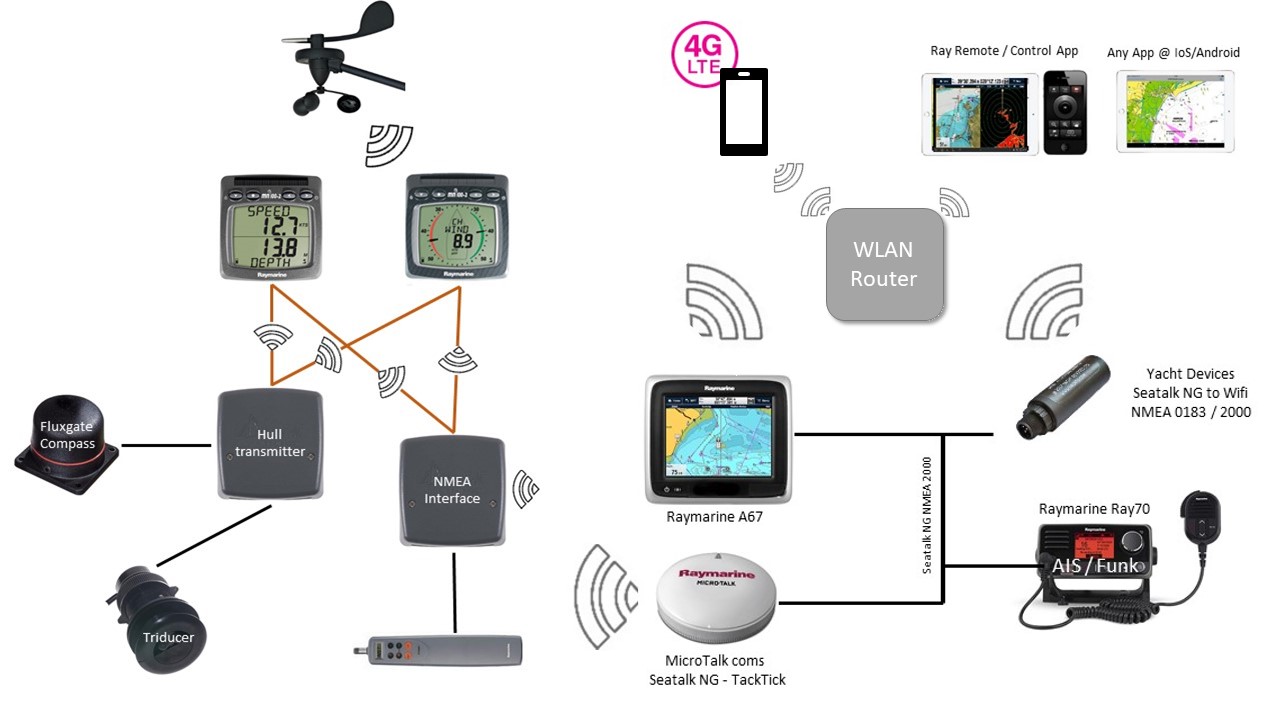
NMEA Daten werden im Yacht Device gesammelt und an den WLAN Router gesendet. Daten aus dem Raymarine Plotter werden ebenfalls über den Router ausgeliefert und empfangen um sich z.B. über ein Netz mit dem Plotter zu verbinden. Gleichzeitig übernimmt mein iPhone die Aufgabe eines Hotspots und stellt einen Internetverbindung, einen Internet-Breakout her, die alle Devices nutzen können. Vorteil ist, die Anmeldung an den Router bleibt immer gleich, egal ob ich den Hotspot oder sonst was ändere.
Das IOS Problem!
Eigentlich ein Feature, welches aber zur Verzweiflung bringen kann wenn man es nicht kennt. Apple hat irgendwann ab IOS 13 (evtl. sogar früher) die Funktion der Privaten WLAN-Adresse eingeführt. Dabei ändert das Iphone die MAC-Adresse bei jeder Verbindung zu einem WLAN-Router. Damit wird es enorm erschwert, ein Device über mehrere Router zu verfolgen. Bei den Router Verbindungen kann man das allerdings deaktivieren.
Nutzt man nun den persönlichen Hotspot des iPhones um zum Beispiel, so wie ich in dem Bild hier, den Router damit zu verbinden, machen Router das in aller Regel auf Layer 2 Eben, also über die MAC-Adresse. Nun ist beim persönlichen Hotspot aber das selbe Sicherheitsfeature implementiert worden. Sprich, die MAC-Adresse ändert sich bei jedem Connect zufällig und der mit dem iPhone verbundene Router verliert die Verbindung. Und hier kann man das leider nicht abstellen.
Tja und das muss man dann erstmal rausfinden.
Ich habs am Ende über die Logs herausgefunden und dann über die Communities den Fehler verifiziert. Mein kleiner Travel Router mag leider nur Layer 2 und kann somit diese Funktion nicht mehr erfüllen.
Doch was tun?
Zuerst dachte ich an einen Defekt. Neuen Router bestellt, selbes Problem. Dann in den Logs gesehen, dass der Router immer die Verbindung zur MAC verliert. Ok, Problem erkannt und…… ein anderer neuer Router muss her. Nämlich einer, der die Verbindung auf Layer 3 Ebene über die IP-Adressierung aufbauen kann. Nur leider gibts da nicht viele in einer sinnvollen Größe und Stromversorgung für ein Boot. Eigentlich gibt es nur einen, den GLi Mango Router. Ok, bestellt und getestet, funktioniert auf Anhieb. Der Router ist mit OpenWRT bestückt aber leider ziemlich kastriert in seiner Standard Konfiguration. Will man also mehr von seinem Router wie z.B. mit unterschiedlichen VLans arbeiten und etwas mehr Security reinbringen wenn man sich z.B. mit Hafen WLAN´s verbindet, dann muss man LUCI, die OpenWRT Configurations Webinstanz installieren. Das geht spielend nur danach geht eben genau die gewünschte Layer 3 Connectivity nicht mehr. Ok, in LUCI eingestellt und es geht. Neu gestartet und es geht nicht mehr bei unveränderter Konfiguration. Zum Glück hab ich schon so viel graue Haare.
Ich hab es auf dem Gli nun nicht rausgefunden, wie ich ein Standard OpenWRT dazu bekomme auf Layer 3 zu arbeiten. Also wieder auf Werkseinstellung und geht halt ohne weitere Funktionen.
Mein alter TL-WR904AC kann doch auch OpenWRT?
Ich erinnerte mich daran, dass die Kiste das auch kann. Also OpenWRT auf den Router geflasht. Wer nicht weiß wie das geht, einfach nach OpenWRT TP-WR904 suchen.
Nachdem das System nun frisch war, die 2.4 Ghz WLAN entsprechend konfiguriert und voilá, ich hätte gar keinen anderen Router gebraucht. Nu versteht der alte Router sich mit dem iPhone und alles ist wie gewohnt. Und ich kann weitere VLans konfigurieren um z.B. den WLan Hafentraffic über die 5G Verbindung zu verbinden und mit entsprechenden Firewall Regeln zu sichern.
Die Verbindung mit dem iPhone dauert ab und an echt lange. 2 Minuten kann das schon. Also nicht wundern.
Den GLi Router behalte ich dennoch als Backup.
Iphone Settings
Beim iPhone muss man übrigens den Schalter „Kompatibilität maximieren“ in den persönlichen Hotspot Einstellungen immer aktivieren. So konfiguriert sendet das iPhone lediglich über das 2.4GHz Netz. Ein kleines Kompatibilitätsproblem zwischen dem Hotspot und den bekannten Travel Routern.
Natürlich könnte es sein, dass es noch eine andere Lösung gibt oder geben kann. Nach meiner Recherche Stand heute leider nicht. Somit wäre es nett, wenn Du eine weitere Lösung, zum Beispiel ein Setting im iPhone, kennst, einfach zu kommentieren.
Weiterlesen



























Neueste Kommentare